機械システム工学科 学びの特色:6. 機械システム x 副専攻
Back: 学びの特徴:5. PBLモノづくりによる学問の実践
副専攻制で、他分野を融合したより高度な機械システム工学を習得
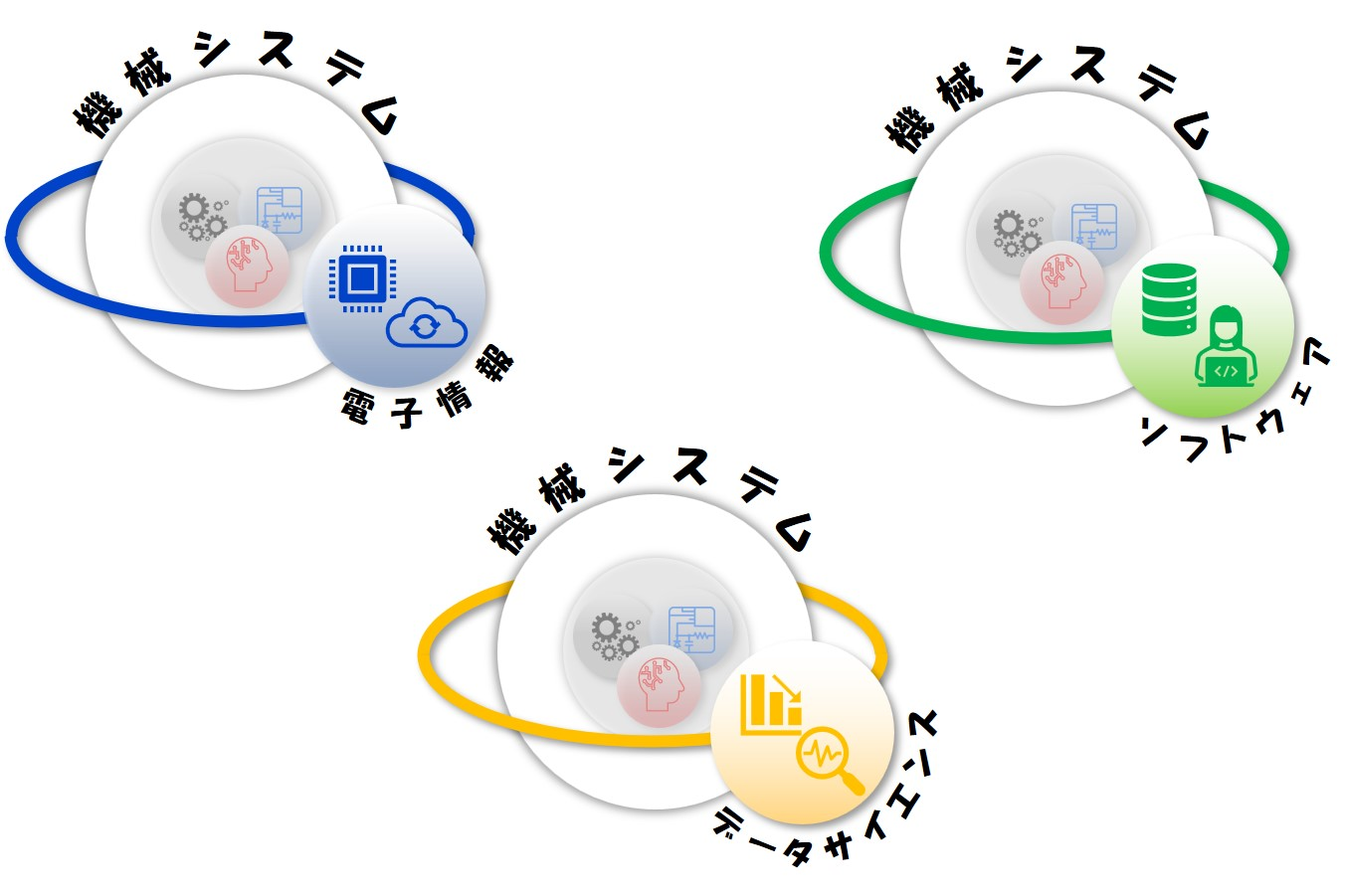
理工学部では副専攻制を採用しており、機械システム工学科(メジャー)に加えて、他学科のどれか一つを副専攻(マイナー)とします(2年次より)。将来像や興味に合わせた選択をすることで、より強みを持つ技術者を目指すことができます。
組み合わせとして「機械システム X 電子情報」「機械システム X データサイエンス」「機械システム X ソフトウェア」があります。それぞれの特徴について、先程のPBLモノづくりを例にして説明していきましょう。
機械システム x 電子情報
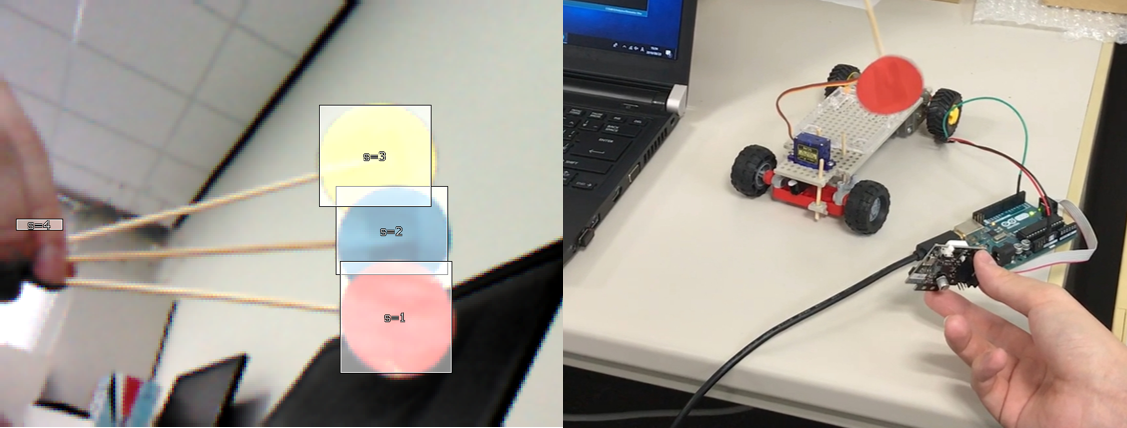
移動ロボットのプロジェクトでは交通信号に対する自動運転をテーマにしています。具体的には、移動ロボットを制御するマイコン(マイクロコンピュータ)にはカメラが接続されており、信号に見立てた黄色、青、赤のサインをカメラで認識して、進む、止まるといった行動を選択します。
まず、カメラでサインの色を判別するためには,撮影した画像情報の処理(画像処理)を行う必要があります。次に、認識できた色に応じて移動ロボットを動かすため、タイヤを電気モーターで回転させなくてはいけません。しかし、マイコン自体は電力が乏しく単独ではモーターを駆動できません。そのため、電源としてバッテリーを用意して、マイコン、モーター、バッテリーによる電気・電子回路を組み込むことで、モーターに電圧を印加して動かします。
これらの画像処理やモータ駆動の技術は電子情報工学科の専門分野であり、副専攻として選択することで、機電融合した機械システムのエキスパートになれます。
機械システム x データサイエンス
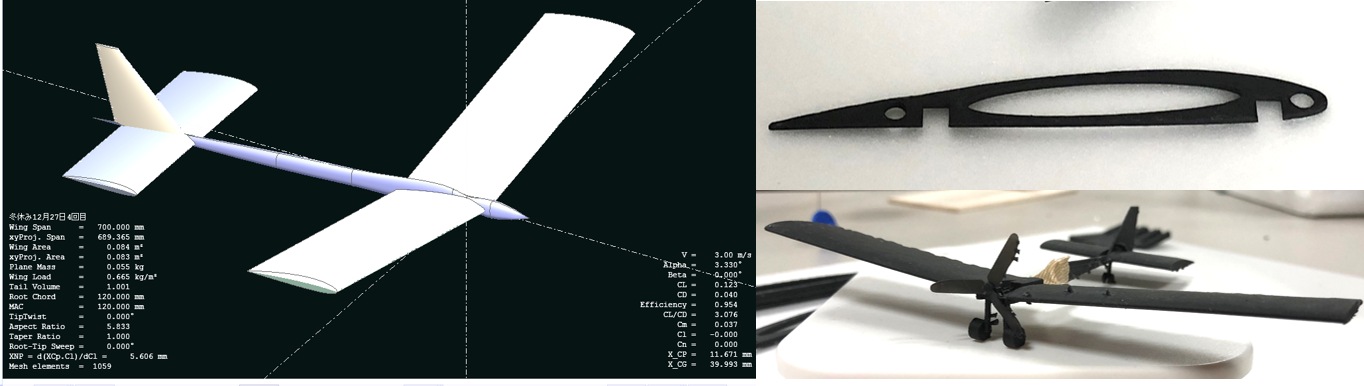
室内飛行機は、空気から力(空力)を受けて浮上、降下、旋回のすべての動きを行うため、空気の影響を決定する翼の形状が何よりも重要です。空力学(物理学の発展科目)により翼の形状と空力の関係が分かるため、このプロジェクトでは、望みの飛行性能を発揮する翼を3Dプリンタで作成することで、オリジナルの機体を作成しています。
しかし、空気から受ける力は非常に複雑で、数式だけでは完全には表せない影響があります。そこで、実験によるデータ計測、処理・分析と特徴抽出を行うことで、翼の形状をより最適なものに近づけていく作業が必須になります。
データ処理・分析により適切な特徴を見出すことは、データサイエンス学科の専門分野であり、副専攻として選択することで、理論と実際のデータの両面に強いモノづくり技術者になれます。
機械システム x ソフトウェア
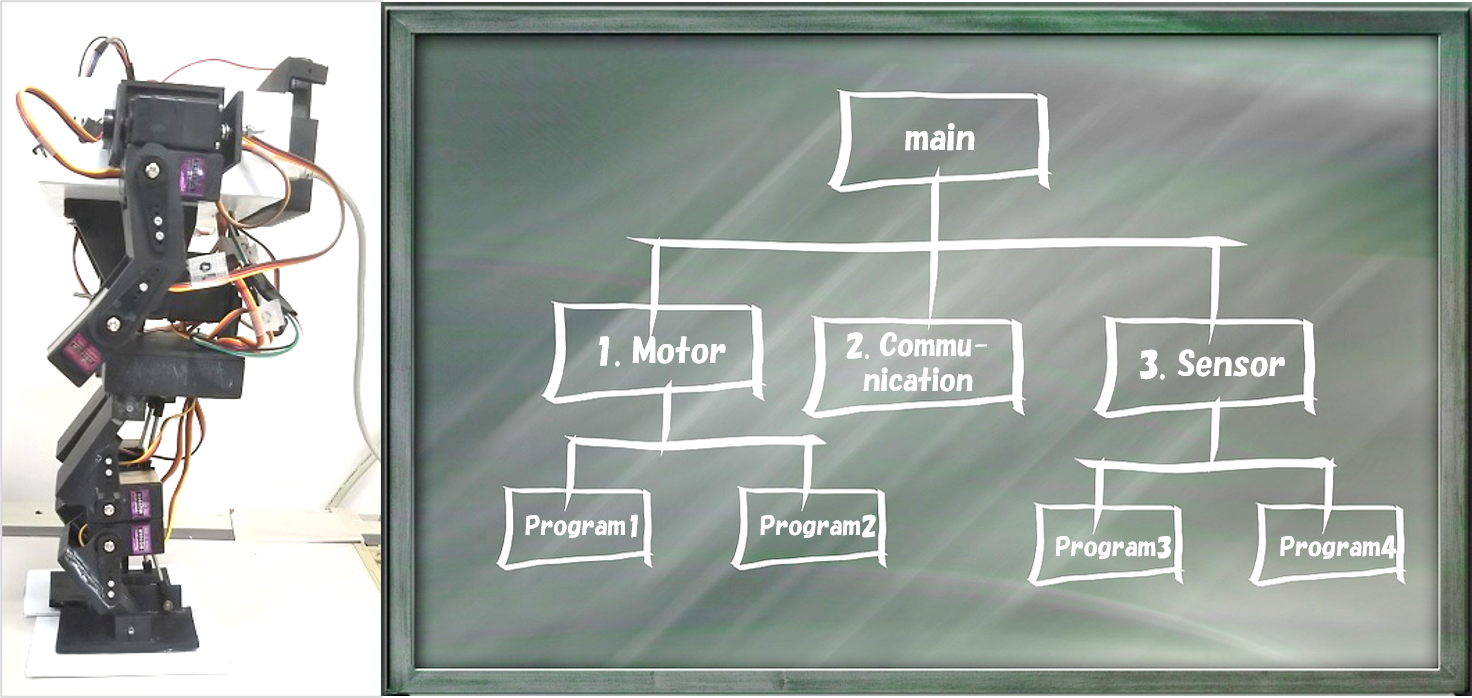
二足歩行は複雑な動作であり、複数の作業(タスク)を同時に実行する必要があります。大雑把に分けても「1.足・腰・腕を動かして歩行運動するモーター制御」「2.コントローラからの指令を受け取る通信」「3.体の傾きを計測して転倒を防ぐ安定化制御」のタスクがあります。
実際にロボットを動かすためには、いずれのタスクもプログラムとして書き直なくてはいけません。また、タスク1~3のプログラムは互いに連動することが求められます。
例えば、タスク1(歩行)は体を傾けるためタスク2(姿勢安定化)と矛盾します。タスク1による姿勢の傾きを「転倒せず、かつ歩行を妨げない」程度にタスク2で安定化する緻密な動作を実現するためには、適切なアルゴリズム(手順や計算方法を扱う学問)が必須になります。
これらプログラミングやアルゴリズムはソフトウェア工学科の専門分野であり、副専攻として選択することで、機械システムの性能を最大限に引き出せる技術者になれます。
