機械システム工学科 教員・研究室:稲垣伸吉
多脚移動ロボットが拓く新しい移動機構
人の命や財産を救うロボットを作りたい

我々の生活は様々な移動手段に支えられていますが、最も普及している車輪型の移動機構では移動できない地形が数多くあります。例えば、災害時に舗装された道路が崩壊したために、人や物資を運べないというニュースをよく目にします。そのような環境でも移動できる移動機構があれば、多くの人の命や財産を救うことができるでしょう。そこで、私の研究室では6脚以上を持つ多脚移動ロボットを研究しています。多脚移動ロボットは脚数が多いために、安定性が高く、複雑な地形も歩け、重いものも運べます。多脚移動ロボットは新たな移動機構としての大きな可能性を秘めているのです。
生物の歩き方の不思議から始めた研究
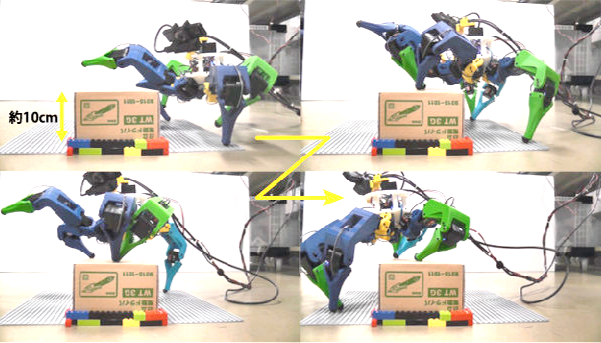
多脚移動ロボットの最も重要な課題の一つは歩行制御です。多脚生物が多くの脚を絡めずにうまく動かすという仕組みは不思議であり、100年以上の研究の歴史があります。その中で知られている現象として「接地点追従」があります。これは「各脚は前脚が接地した同じ地点に接地する」というもので、悪い足場を歩く猫や、ナナフシのような昆虫、ムカデなどに観測されます。この原理に基づく歩行制御法を私の研究室では新たに開発し、複雑な不整地での歩行実験に成功しました。また、専用の電子回路の設計、プログラミング、3Dプリンタを用いた本体の作製もしています。理論だけでなく、ハードからソフトまでを一貫して扱えるのは機械システム工学科の特徴といえます。
主な研究業績
- Design and Analysis of Distributed Energy Management Systems Integration of EMS, EV, and ICT, Springer, 2020(共著)
- 接地点追従法と6脚移動ロボット、ロボット学会誌、37巻2号、pp. 156-159、2019年(共著)
- 接地点追従による多脚移動ロボットの歩行制御~古くて新しい分散歩行制御~、計測と制御、55巻4号、pp. 265-271、2015年(単著)
