機械システム工学科 教員・研究室:杉本謙二

制御と学習とネットワーク
フィードフォワードの適応学習制御
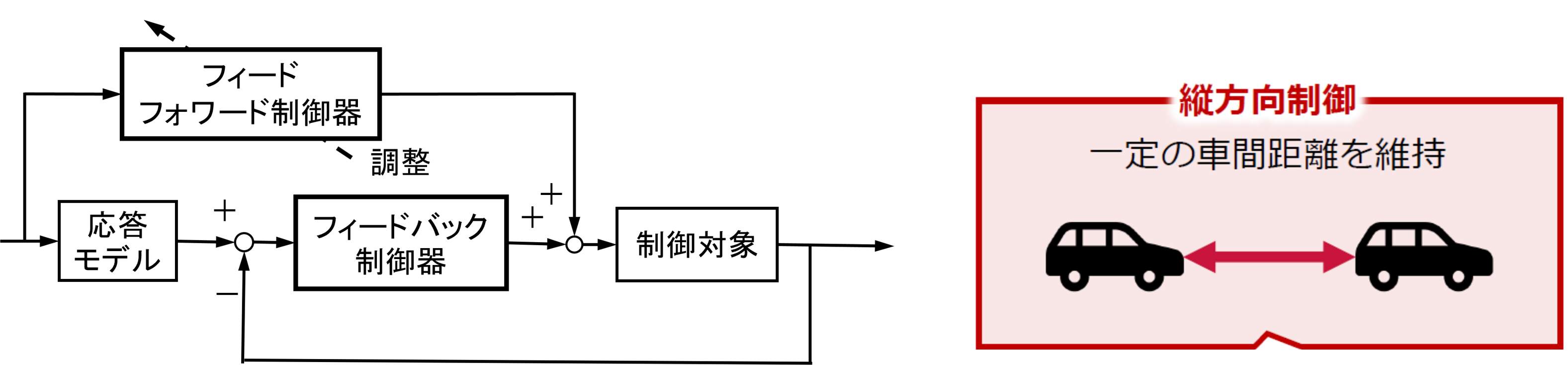
フィードバックは出力結果を元の入力に返すため、時には反応が遅くなります。そこで指令値を先回りして加えれば早い応答が得られることがあり、フィードフォワード制御と呼ばれます。これをオンラインで調整し、モデル誤差に対処する研究をしています。最近はこれを隊列走行の縦方向制御に応用し、小型移動ロボットによる実験を行っています。
ネットワーク化制御のための切り替えシステム

ネットワークを経由した制御では、制御信号をパケットごとに送るため損失や遅れが生じることがあります。損失は計測の失敗でも発生し、ノイズや測定誤差などとは全く異なります。また、従来のプロセス制御などでは一様な遅れがありましたが、パケットの遅れはランダムで、追い越しも生じてしまいます。これらの問題を切り替えシステムの導入によって解決する手法について研究しています。
主な研究業績
- K. Sugimoto and W. Imahayashi; Establishment of Strictly Positive Real Condition for Tuning MIMO Feedforward Control, IEEE Control Systems Letters, Vol. 6, pp. 1454-1459 (2020)
- K. Sugimoto, T. Aihara, M. Ogura, and K. Hanada; Gain Scheduling for Sampled-data State Estimation over Lossy Networks, システム制御情報学会, システム制御情報学会論文誌, 34巻11号, pp. 287-293 (2021)
