機械システム工学科 教員・研究室:陳幹

理論と現実のギャップを考慮するロバスト制御
机上の空論といわれないために
制御系の設計は、1.制御したい対象の振る舞いを物理法則等を用いて、数式(数学モデルといいます)で近似する, 2.得られた数学モデルに対して様々な理論を用いて、対象を思い通りに操るアルゴリズムを求める, 3. コンピュータ上で、数学モデルと得られたアルゴリズムに対するシミュレーションで安全性や性能などを確認する, 4. 現実世界の制御したい対象に、シミュレーションで安全性や性能が確認されたアルゴリズムを搭載する, という手順をふむことが多いです。しかし、机上の空論という言葉があるように、シミュレーションでうまくいっても、実際に動かすとうまくいかないことが多々あります。ロバスト制御とは、この理屈(数学モデル)と現実のギャップも考慮に入れ、現実での失敗をより少なくするようなより安全な制御です。
実機を用いた有用性の検証
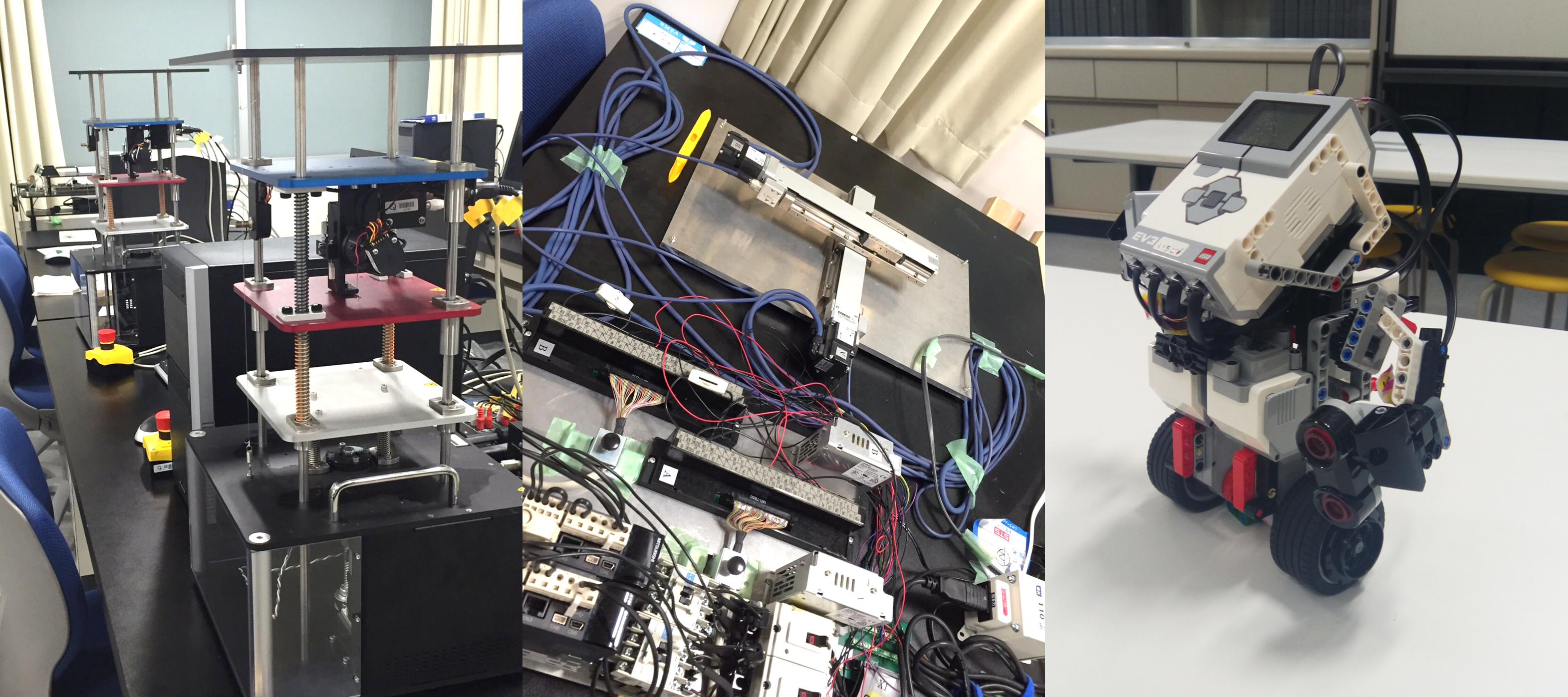
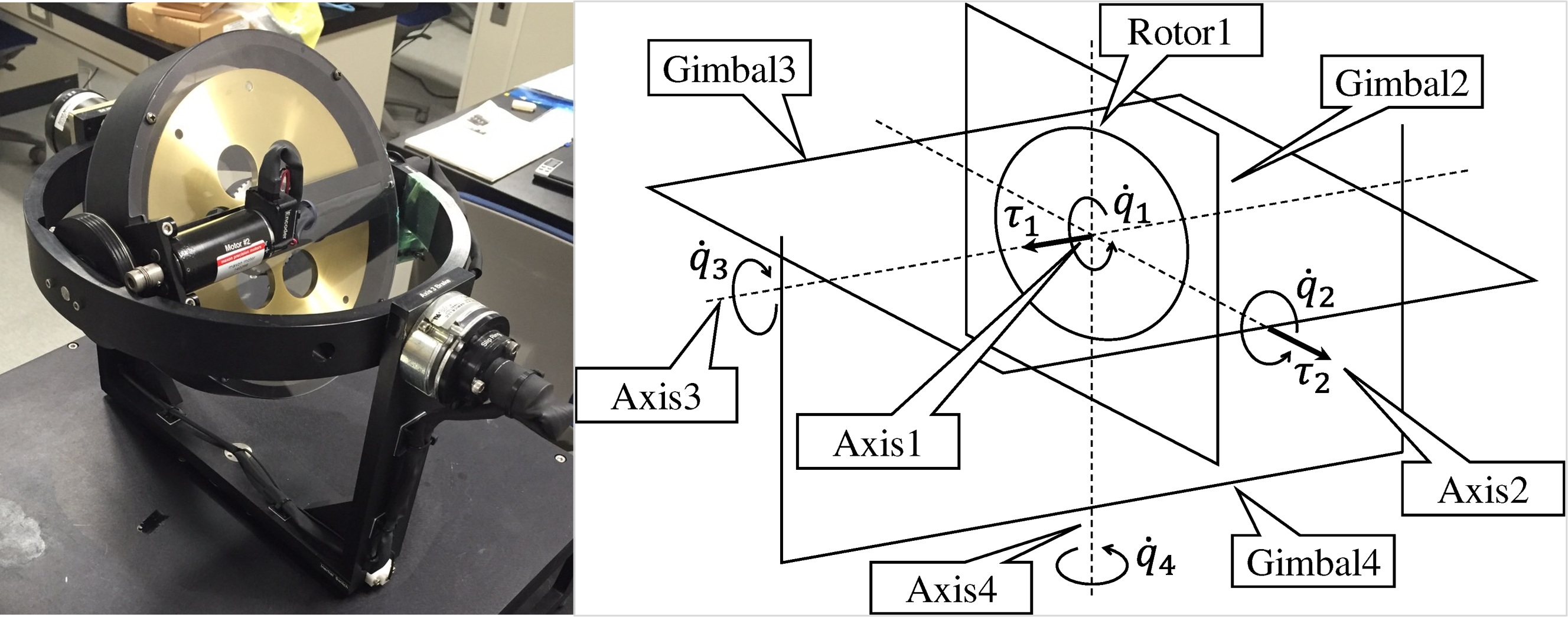
研究室では様々な実験機を実際に動作させて、設計した制御アルゴリズムの有用性を検証しています。大きなものとしては、自動車に搭載されている ABS やアクテイブサスペンション、人工衛星の姿勢制御に用いられる Control Moment Gyroscope, 精密位置決めに用いられる X-Yテーブルなどがあります。小型の移動ロボットを用いて実験を行うこともあります。
主な研究業績
- T.Inaba, I.Takami and G.Chen, "Gain scheduling controller synthesis for control moment gyroscope using improved approximation," SICE Journal of Control, Measurement, and System Integration,SICE,Vol.11, No.6,pp.502-509, 2018
- T.Yamamoto, G.Chen and I.Takami, "Robust control design for ball screw system focusing on the friction model," International Journal of Modeling, Identification and Control,Inderscience Publishers,Vol.26, No.3,pp.207-217, 2016
