機械システム工学科 教員・研究室:坂本登

実際の現象に忠実な制御理論とその実用化
航空機や衛星の複雑な動きを正確に操る非線形制御理論
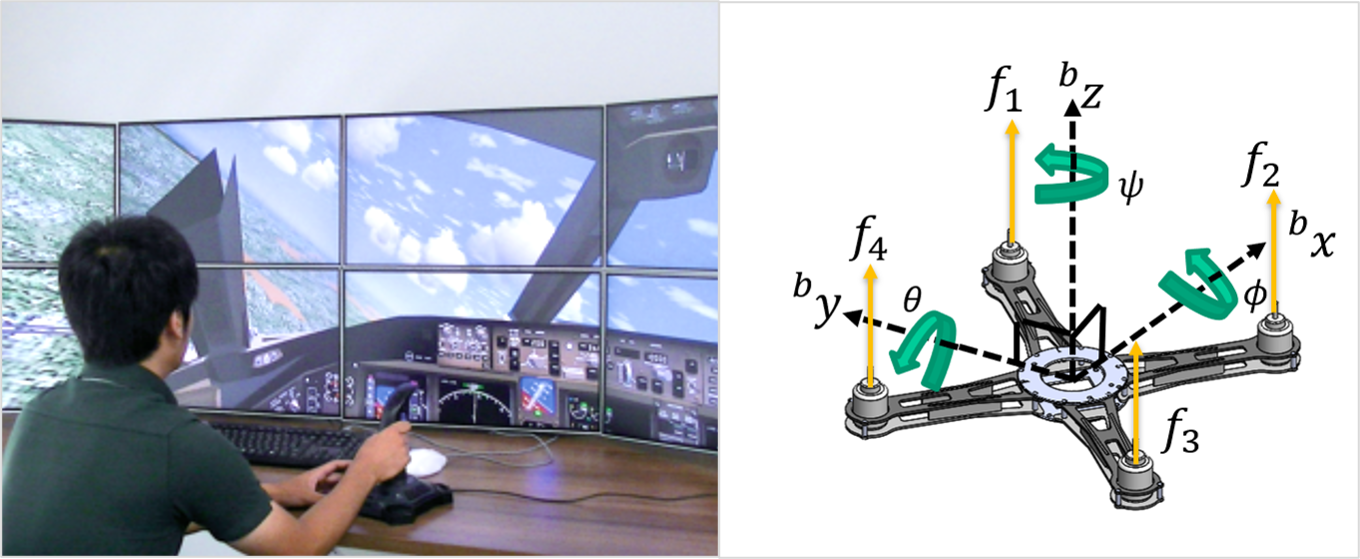
制御理論は、航空機やドローン、自動車など様々なモノを思いどおり操るために利用されています。そのほとんどは、実際の複雑な動きのごく一部を、時間経過とともに一定量変化するような単純な動きとみなして行う「線形制御」です。しかし、航空機が急激に大きく機首を上げる動きや衛星が姿勢を変える動きをはじめ、現実のモノの動きを広範囲にわたり正確に操ろうとすると、「非線形制御」でなければカバーしきれません。その際に問題となるのが、「ハミルトン-ヤコビ方程式」と呼ばれる偏微分方程式。半世紀もの間、その解法は存在せず、実用化は困難とされてきました。それを可能にしたのが、数学的観点から制御理論にアプローチした私の研究です。
理論を実際のシステムへ応用
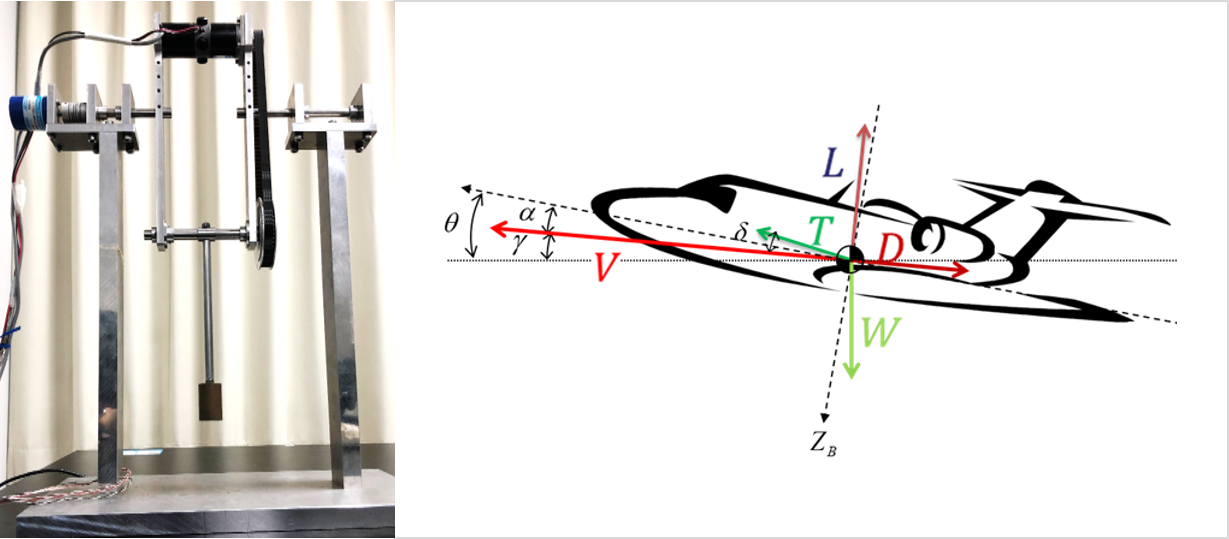
新たな解法を提案したのに加え、そのロジックをプログラム化して、実システムへの応用を可能にしました。企業との共同研究により、再利用型ロケットの着陸時の姿勢制御などへの応用も行い、さらには、体操選手が行うような複雑な運動がこの方程式から実現できることをアクロボットという実験装置で実証しました(上図左)。多様な場面で現実のモノの動きを正確・精密に操ることを可能とする非線形制御を、理論の確立で満足せず社会に役立てるため、さらなる研究に取り組んでいます。
主な研究業績
- The turnpike property in nonlinear optimal control --- A geometric approach, Automatica, (2021) in press.
- N. Sakamoto, A. J. van der Schaft; Analytical approximation methods for the stabilizing solution of the Hamilton-Jacobi equation, IEEE Transaction on Automatic Control, Vol. 53, No. 10, pp. 2335-2350 (2008)(2015年計測自動制御学会制御部門木村賞受賞)
- T. Horibe and N. Sakamoto; Nonlinear Optimal Control for Swing Up and Stabilization of the Acrobot via Stable Manifold Approach: Theory and Experiment, IEEE Control Systems Technology, Vol. 27, No. 6, pp. 2374-2387 (2019)
- 新インターユニバーシティ システムと制御,オーム社,2008年(共著)
