機械システム工学科 学びの特色:4. システム制御工学による横断的な学び
Back: 3. 「三つの能」を修得する学問
システム制御工学は「よこ糸」
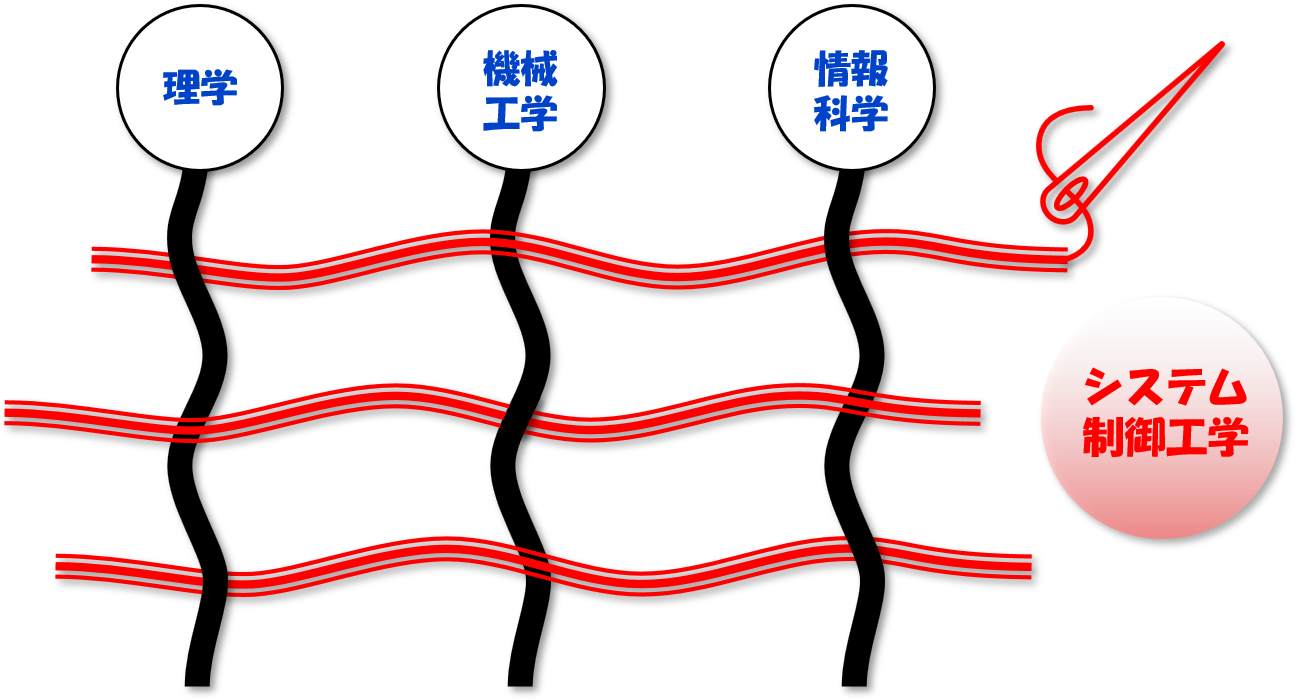
理学・機械工学・情報科学はそれぞれが独立した分野であり、縦型の学問(たて糸)と呼ばれています。これらが融合した「機械システム」を上手に扱うためには、構成要素が「どのように連動し合うのか?」「どうすれば目的の通りに動かせるのか?」といったことに関する知識が必須になります。
この「融合の仕方」を扱う学問が「システム制御工学」です。その役割から必然的に様々な学問の特徴をあわせ持つため、横断型の学問(よこ糸)とも呼ばれています。以下では、このシステム制御工学の特徴である「モデリング」と「コントロールデザイン」について説明していきます。
「モデリング」で規格統一して共通点を見出す
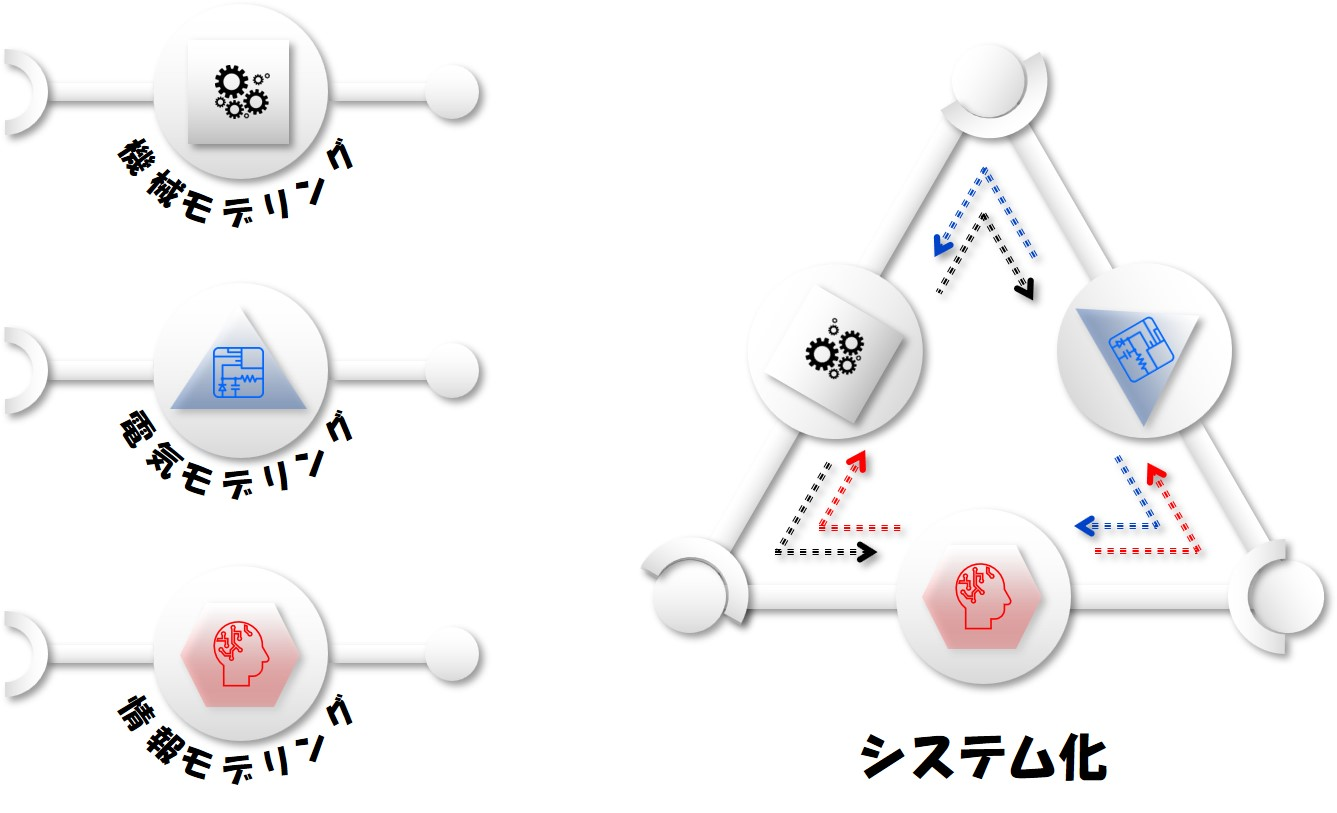
「モデリング」では、科学の共通言語である数学を駆使することで、異なる分野である機械・電気・情報を「共通の形式(モデル)」に整えます。
この「モデル」は同じ規格を持つため簡単に結合することができ、異なる要素を融合した「システム」を作成することができます。また、異なる分野を「モデル」として揃えることにより、機械・電気・情報を「統一的に見通す目」を持つことができます。例えば、機械は好きだが電気が苦手な人は、「機械の理屈」で「電気の仕組み」を解釈することができます。
このような、一見異なる分野の共通点は「アナロジー(類似性)」と呼ばれており、このアナロジーを見出すことは、システム制御工学の得意とすることです。
「コントロールデザイン」で物理特性を改造する
「コントロールデザイン(制御設計)」では、誤解を恐れずに言えば、機械システムの「物理特性の改造」を行います。
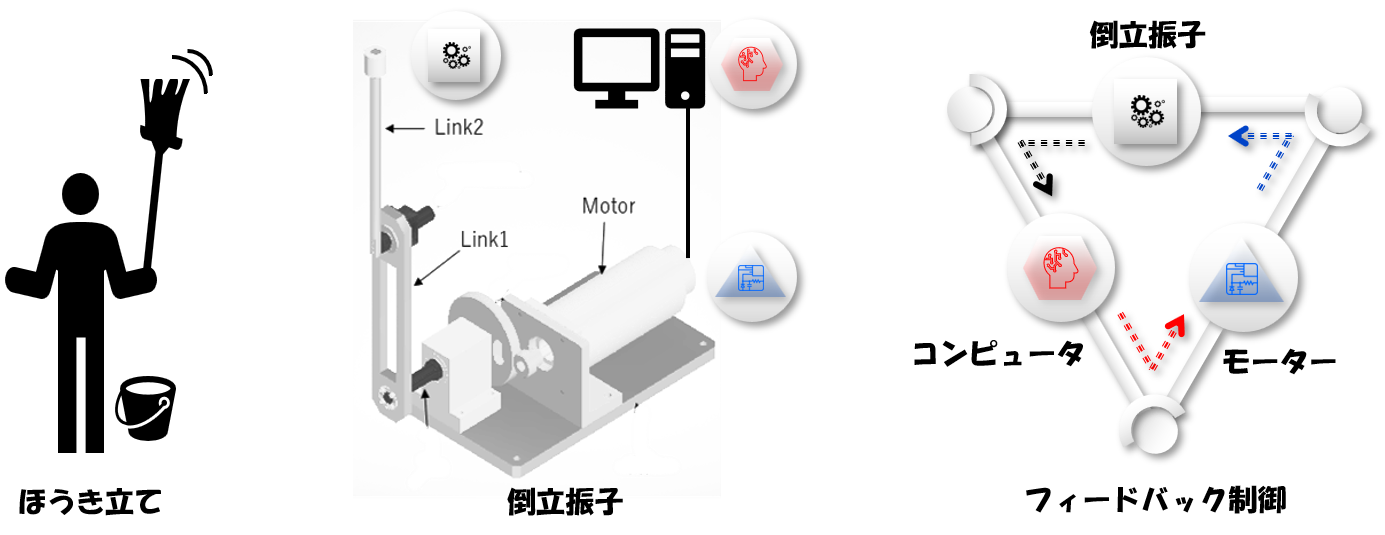
誰しも一度はほうきを手の平に立ててバランスをとる遊びをしたことがあるでしょう。これを真似た機械システムを「倒立振子」と呼び、人間の腕の役割をする LINK1 を動かし、ほうきに見立てた LINK2が倒れないようにします。LINK1・2が機械、LINK1 を動かすモーターが電気、倒れない動作を決めるコンピュータが情報に対応しています。
「振り子を倒さない LINK1 の動かし方」を詳しく見ていきましょう。「振り子が傾く(機械)→コンピュータで振子の角度から LINK1 の動作を決める(情報)→モーターで LINK1 を動かす(電気)→振り子が動く(機械)→・・・(以後繰り返し)」となっています。これは、コンピュータから見て「自分が起こしたアクションが巡り巡って返ってくる」ことから、「フィードバック制御」と呼ばれています。
このような「ループ構造」のフィードバック制御を倒立振子(機械システム)に「組み込む」ことにより、「振り子が倒れることが自然な状態」から、あたかも「振り子が倒立状態で倒れないことが自然な状態」のように「物理特性を改造する」ことができるのが「コントロールデザイン(制御設計)」なのです。
