機械システム工学科 教員・研究室:中島明

まだ世にない「ロボット制御技術」を研究する
ロボットはあらゆる技術が複合した機械システム
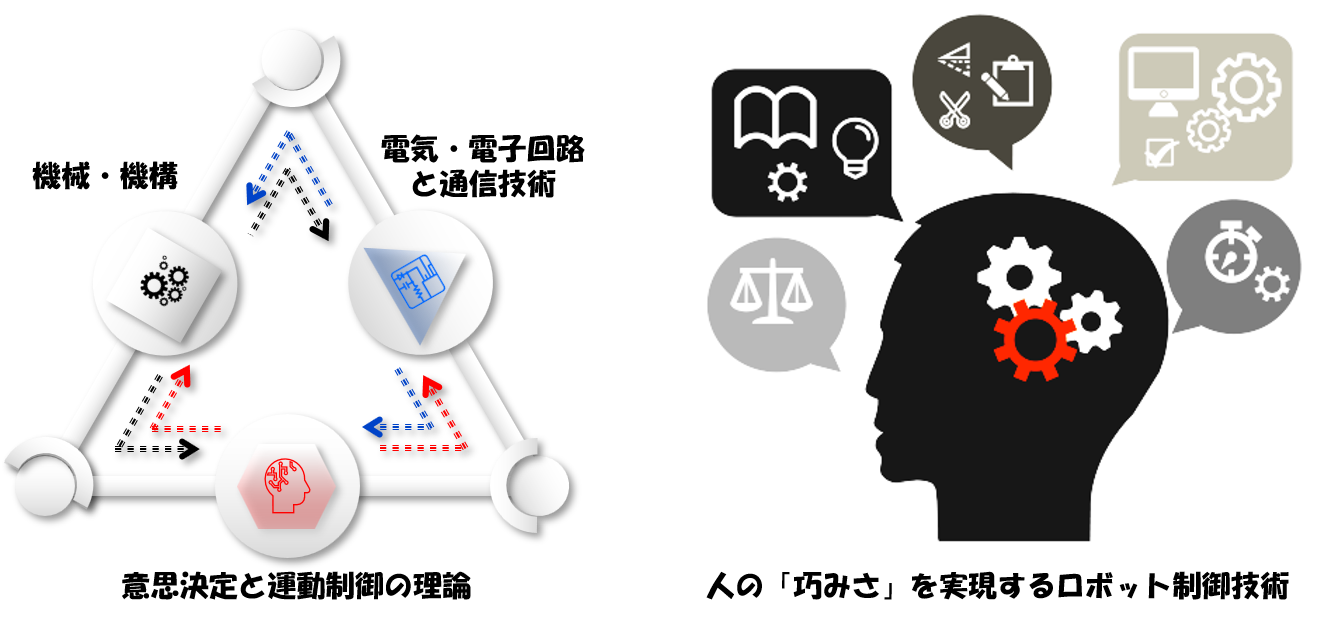
ロボットは色々な技術の複合により成り立っています。ヒューマノイドロボットを例に説明すると、"体"にあたる「機械・機構」、"認知・神経伝達"にあたる「計測、電気・電子回路と通信技術」、"頭脳"にあたる「意思決定と運動制御の理論」があります。ロボット開発ではこれらを三位一体として向上させることがとても大事ですが、最も重要なものは"頭脳"であり、「巧みさ」を実現するロボット制御技術の開発が私たちの研究テーマです。
「細やか」であり「ダイナミック」でもある人間の巧みさを目指して
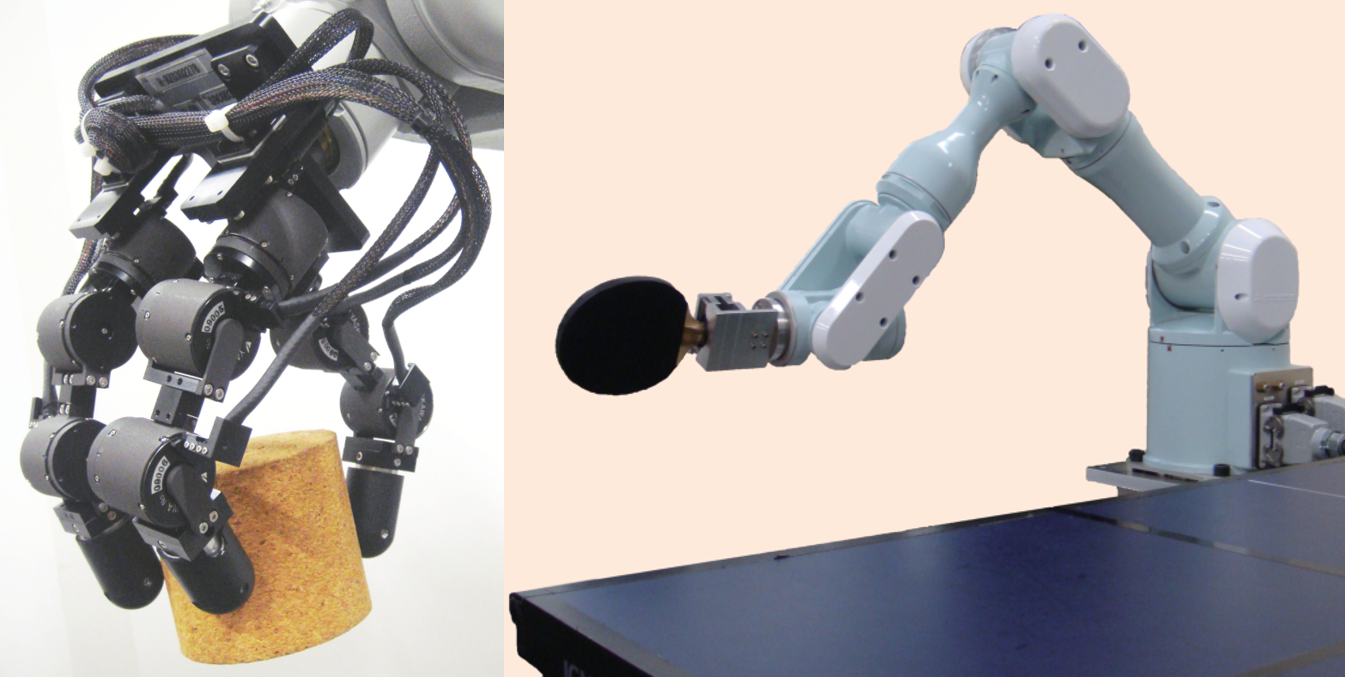
人間は手先の細やかな動きで様々な道具を使いますが、一方でボールを投げるなど高速な動作も得意としており、「細やかさ」と「ダイナミック」な相反する巧みさを持っています。多指ハンドロボットの研究開発では、重さ・大きさ・形状などの異なる色々な物体の安定把持、ペンやハサミの道具の使用や折り紙といった「細やかな巧みさ」の実現を目指しています。一方では「ダイナミックな巧みさ」を目指して、ボールジャグリングや卓球ロボットの研究開発も挑戦していて、高速運動と正確なボールコントロールの両立に取り組んでいます。私たちはこれら人間の巧みさを実現することで、真に人間社会に役立つロボットを目指しています。
主な研究業績
- A Palm Circle Task Controller of Contact Juggling for Ball-and-Plate System with 6-DOF Manipulator, Proceedings of Annual Conference of the Society of Instrument and Control Engineers of Japan, pp. 618-623 (2021)
- 配位座標の制限を伴う2指ハンドによる転がり接触の非ホロノミック性に基づく把持対象物の操り制御,計測自動制御学会論文集 ,計測自動制御学会,vol.54, No.3,pp. 320-330 (2018)
- シミュレーション装置が参照するマップの生成装置及び生成方法 (特開2016-149095)
- Racket Control for a Table Tennis Robot to Return a Ball, SICE Journal of Control, Measurement, and System Integration, Vol.6, No.4, pp. 259-266 (2013)
- Control of Grasp and Manipulation by Soft-Finger with 3-Dimensional Deformation, SICE Journal of Control, Measurement, and System Integration, Vol. 2, No. 2, pp. 78-87 (2009)
- 能動型防振適応制御装置(特開2009-151570)
