

猫やムカデと同じ歩き方
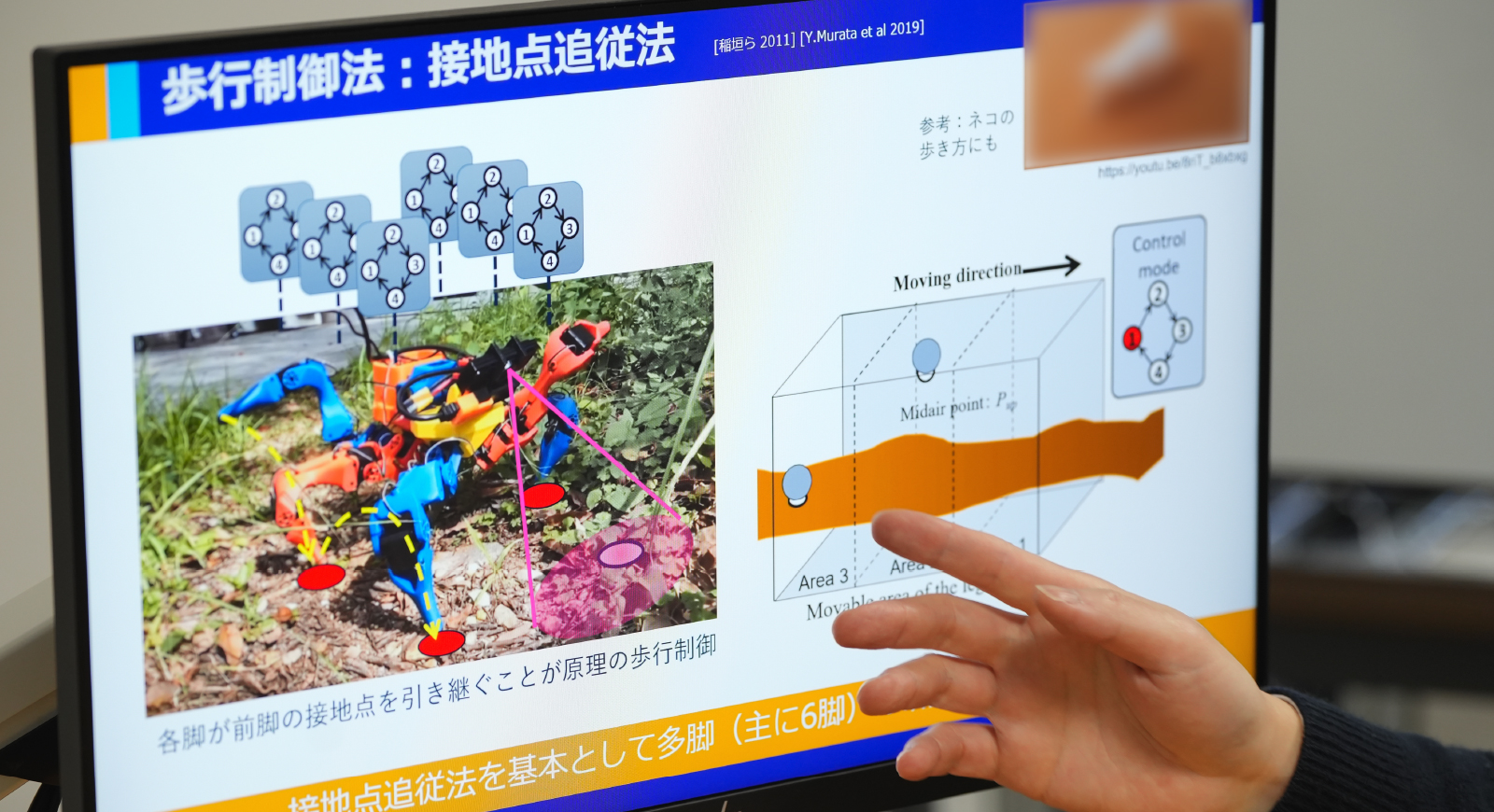
「接地点追従法」
多脚ロボットを、ちゃんと歩かせるのは難しいと言ったら、驚くでしょうか。足が多ければ安定しそうに思えるでしょう。でも、平地では歩けても、悪路の安定歩行となると非常に難しいのです。昆虫は小さな脳で6本の脚を巧みに動かしますが、もし私たちが6本脚になったら、どの順番に動かせばいいか分かりませんよね。多脚ロボットがうまく歩くための歩行原理は、多くのロボット工学者が長年考えている問題です。
私は6脚ロボットを使い、凹凸の大きな場所での安定歩行に成功しました。採用した歩行原理は、前脚に追従して次の脚を置く方法で、砂場や塀の上など不安定な場所を歩く猫や、ムカデがする歩き方。「接地点追従法」は、この歩行原理をコンピュータアルゴリズムとして、私が開発した歩行制御法です。先頭の脚がうまく地面に着くことができる接地点を見つけ、次の脚に受け渡します。接地点を障害物上に置けば、障害物を乗り越えられます。各脚が独立した分散制御になっており、連結させて脚の数を増やすことも可能です。さらに、各脚の役割を変えながらうまく連携させることで、1脚を上げて歩くことや、2脚でモノを持ち4脚で歩くことにも成功しました。こうした例は他に見たことがなく、世界初だと自信を持っています。
凹凸の大きな場所での安定歩行が可能に
新技術を次々採用できる
ロボット研究の魅力
私はSFが大好きで、幼稚園の頃に見たロボットアニメでは、ヒーローのロボットより、ユニークな形をした敵のロボットに惹かれ、将来はロボットを作ることを夢見るようになりました。大学の研究室で多脚ロボットを知ると、「生物が多様な形で地球環境に適応したのと同様に、ロボットもいろいろな形があってしかるべき」と思うようになり、同じ研究室のメンバーが2脚や4脚のロボットを選ぶと、なおさら「自分が多脚ロボットを研究しなくては」との思いを強くしました。ちなみに、研究でも参考にする虫は、実物は苦手。でも、映像で観察する規則的な脚の動きは、実に美しいと感じます。
ロボットの研究では、制御方法の設計から、電子基板やプログラムの製作、本体の組立まで、ハードもソフトもすべて扱います。「2脚で接地点を交換する際に、膝がぶつからないように」といった設計の工夫もします。すべてをうまく開発する苦労はあるものの、世の中に次々と登場する小型で高性能なコンピュータやセンサ、3Dプリンタ、新しい制御理論などを、新鮮なうちに取り入れられる魅力があり、飽きることがありません。しかも、今の技術は私の学生時代と比べたら天国のよう。みなさんが研究室に入る頃には、もっと楽しいことが増えているでしょう。
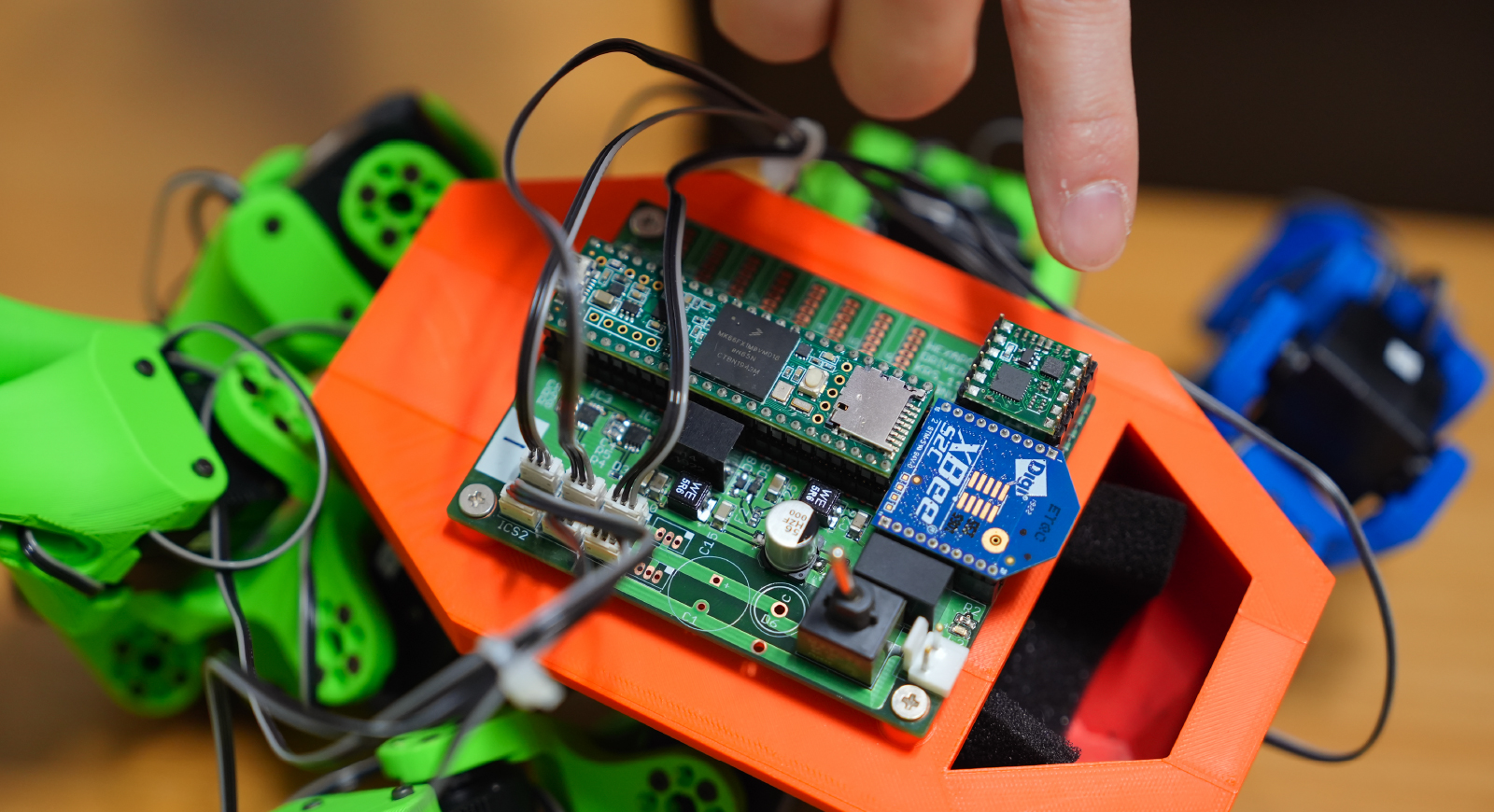
すべて自作のオリジナル
災害時も日常も
仕事ができるロボットを
安定歩行の次に待つ課題は、全身の制御です。現状のロボットでは、脚を置く位置に関しては、ロボットに搭載したカメラからの情報をもとにロボット自身が計算していますが、どちらの方向に移動するかや胴体をどの程度傾けてバランスを取るかは、人があらかじめ決めています。その判断も含め、全身の動きをロボット自身で統括できる制御を研究しています。将来的に目指すのは、複雑な不整地や急斜面、ドロドロの沼などを越えて荷物を運べること。また災害時以外でも、作業員と同行して設備の点検やメンテナンスなどの仕事ができることです。共同研究先の企業では、将来は人が乗れることを目標に掲げていて、そのための技術も開発・提供していきます。
高校生のみなさんには、大学を偏差値やイメージで選ぶのではなく、どんな先生がいてどんな研究・学びがあるのかを自分で調べ、本当にやりたいことができる進路を選んでほしいと思います。例えば、ロボット研究は多彩な知識の集合体であるため、機械システム工学科で学ぶ「現実のモノと情報をつなげる技術」をベースに、電子デバイスやソフトウェア、データサイエンスといった知識もすべて必要です。南山大学理工学部には、それらを学べる副専攻制があり、分野横断の知識を持つ学生は、企業からも高く評価されています。もし多脚ロボットに興味を持ってくれたなら、ここで学んで、ぜひ一緒に研究しましょう。
- 研究室動画を見る
Profile
機械システム工学科 教授稲垣 伸吉
専攻分野/ロボット工学、自律分散システム、エネルギー管理システム