

静の「多指ハンドロボット」と
動の「卓球ロボット」
人間の動きでは脳処理と身体動作が精妙に連動しており、「ゆっくり正確」な動作と「すばやくダイナミックで正確」な動作のどちらも行うことができます。このような人間に備わっている静と動の「器用さ・巧みさ」をロボットで実現する研究をしています。「ゆっくり正確」な動作については、人間の手先の器用さを目指して、小型のロボットアーム3本から構成される「多指ハンドロボット」の研究に取り組んでいます。例えば、モノをつかんで持ち上げ、バランスを取りながら移動させるといった動作は人間にとって基本的な動きです。一見簡単そうですが、実は、堅牢性と柔軟性という矛盾した性質を同時に備えており、さらに正確さも必要になります。これら基本的な性能をロボットで再現することに加えて、ペンやはさみなど多様な道具を使用できるような適応性の実現に取り組んでいます。これまでに、柔軟かつ安定な把持制御、豆腐などの柔らかいモノの把持、折り紙での紙めくり動作、ボルト・ナットの嵌め合い、など様々な器用な把持を実現しています。さらには、人間のような柔らかい指先を再現を目指して、柔軟材料を取り入れた「ソフトフィンガー」などにも取り組んでいます。
一方、「ダイナミックで正確」な動作では、スポーツ競技の中でも特に高速な挙動が必要な卓球に興味を持ち、サーブやレシーブ(打ち返し)が可能な「卓球ロボット」の研究に取り組んでいます。多指ハンドロボットでは、比較的ゆっくりと計測して次の運動の計画を立てます。しかし、卓球では、ボールが非常に高速かつ短時間に飛んでくるため、ボールの動き始めの状態から、飛んでくる位置や速度を一瞬の間で予測し、相手コートのどこに打ち返すか、などの先々の結果を考えてラケットを振る力や角度を計画する必要があります。そのために、ラケットでボールを打ち返す様子を実際に計測し、実験データの裏付けにより、物理学の理論をベースに、ボール運動について独自の数理モデルを開発しました。正確なモデルのおかげでボール運動を高精度に予測することが可能となり、多様なスピンボール(トップ、バック、サイド)を、敵コートの狙った位置に打ち返すようなラケットの運動制御に成功しています。今後は機械学習も取り入れ、対戦相手の動作の予測など、より現実の状況に即した制御へ進化させようとしています。
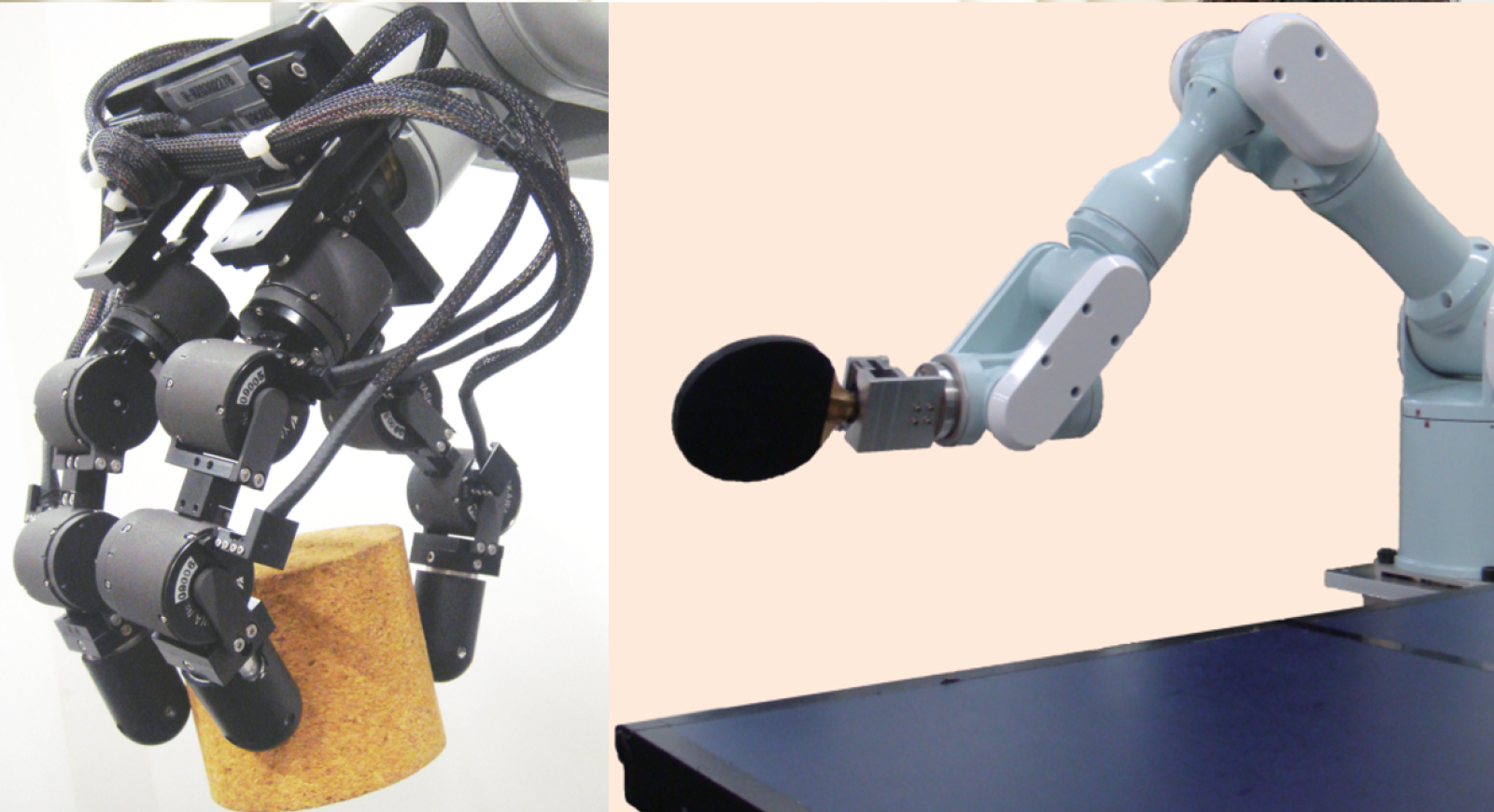
動の巧みさの「卓球ロボット」
要素技術がロボットを
人に近づける
卓球ロボットの研究をしていると、よく「何の役に立つの?」と訊かれますが、実は、卓球ロボットは「卓球以外の動作」も出来ます。実は、卓球ロボットの「研究」からは、別のシチュエーションにも応用できる「要素技術」という重要な知見が得られているのです。例えば、レシーブに必要な予測技術を確立すれば、テーブルからモノが落ちかけたとき、ロボットがサッと手を出してキャッチすることに応用できます。つまり、力の向きだけを打ち返すのとは逆向きに変えてしまえば、落ちていくモノを優しく受け止める動作になるのです。多指ハンドロボットからも同様に、「静の器用さ」に関する要素技術の知見が発見されているため、ハンドの構造(指の関節や本数)や把持するモノの硬さ・柔らかさなどが変わってしまっても対応できる適応性を持っています。そして、将来的にそれらの要素技術を合わせれば、静と動の器用さを併せ持ち、人の手のようにさまざまな道具を自在に扱えて、かつ、日常生活で機敏に動くことができるロボットが実現できるはずです。逆に言うと、そのようなロボットを確立できれば、「人の器用さ・巧みさ」の謎を解明できたことになるわけで、それも研究者として非常に興味深い点です。
ロボットは、別になくても世の中は回るけれど、もし傍らにあったら、さらにうれしいものだと私は考えています。ロボットが日常で身近に存在するようになれば、それは便利な技術にとどまらず、社会を構成するパートナーとすらなり得るでしょう。人の社会に入り込んで、人を助け、付加価値を生むロボットの創造を目指して、研究に取り組んでいます。

リアルに動くモノづくりは
フェイクのない世界
私がモノづくりに興味を持ったのは小学校の頃で、プラモデルよりも、ラジコンやミニ四駆のようにモータで動くものが好きでした。特に、カスタマイズがしやすいミニ四駆に夢中になり、そこで体験したモノを作る面白さが理系へと進むきっかけになりました。例えば、機体に穴を開けると軽量化できるので速く走れるのですが、当初は何も考えずに穴だらけにして何台も壊してしまい、「どうやったら軽さと強度を両立できるのだろう?」と疑問を持ちました。他にも、速くし過ぎるとコースアウトしてしまうことから「速さと安定性の両立にはどうしたら良いのか?」と考えたりと、自然とモノづくりの面白さに触れ、その「本質」を理解したいと思うようになったのです。その後、大学に進学して、非常に高レベルな人型歩行ロボットの研究開発のニュースを見て衝撃を受け、自分もロボットの研究に携わりたい!と強く思うようになり、ロボット制御の研究室に入りました。
総合的なモノづくりをしようと思ったら、一つの技術を学ぶだけでは不可能です。中でもロボットは、多様な技術が融合した最たるもので、あらゆる技術を知らなければ作れません。その観点から、南山大学の副専攻制による学びは実に理に適っていると思います。機械システム工学科を主専攻にして、副専攻でデータサイエンスを学べば、計測データから周囲の状況を学習できるロボットを開発できます。電子情報工学を学べば、IoTのようなモノを含めたネットワークにロボットを含めた拡張が可能になります。また、ソフトウェア工学の知識が加われば、自動車や家電などの個々の特性に応じたプログラミングを考えた組込みシステムを実現できます。では、機械システム工学を主軸に学ぶ魅力は何か?それは動力や機構で動作する、リアルなモノを作り上げられることです。失敗を消せない苦労もありますが、目の前でモノが動くフェイクのない世界の面白さは、何にも代えがたいものです。社会を変えうるリアルなモノづくり技術を、ぜひ一緒に研究しましょう。
- 研究室動画を見る
Profile
機械システム工学科 教授中島 明
専攻分野/ロボット工学、制御工学